


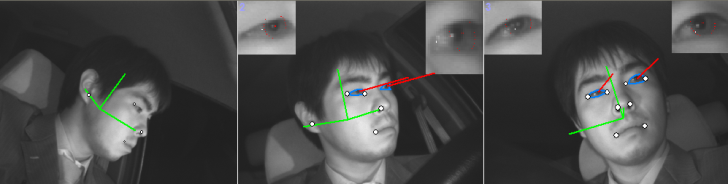
Smart Eye Pro眼动追踪系统,通过对红外线摄像机拍摄的人的脸部的影像进行实时分析,将视线方向,眼睑的开合,瞳孔直径,头部运动定量化,并输出数据的系统。
不会对被测者加装其他装置,没有任何物理或精神方面的负担,与接触式相比更接近自然状态的测量。
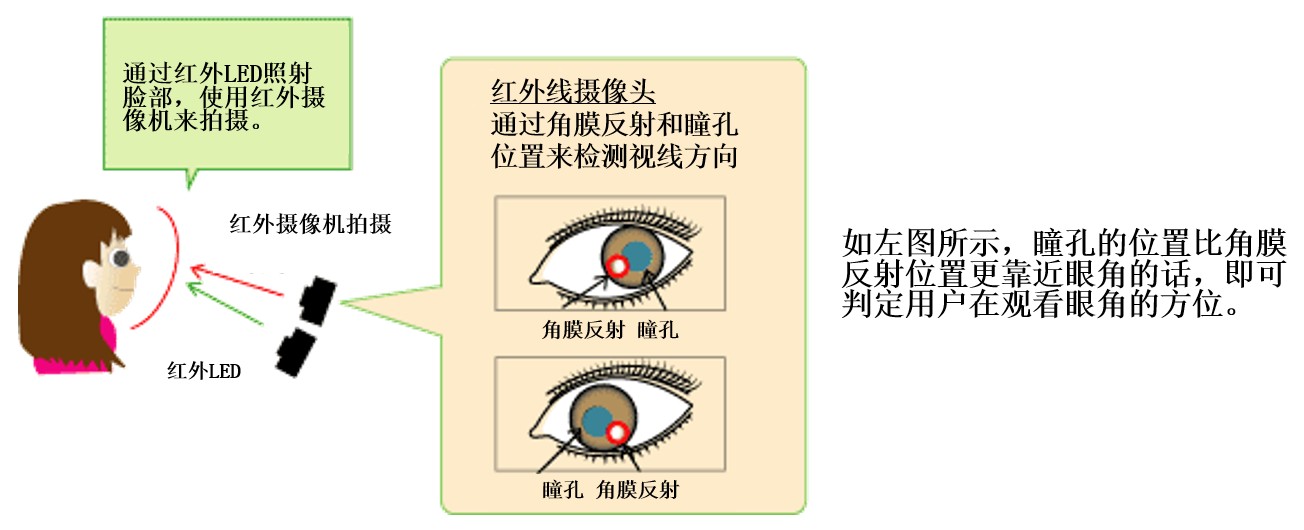
采用主动红外光源照射被测者以产生角膜反射并以此作为基准点,通过计算瞳孔中心与该角膜反射点之间的向量来计算得出视线方向。
在杂光条件下也可以稳定的进行测量。
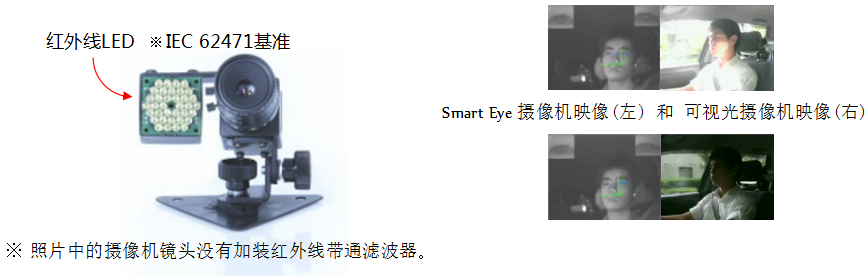
系统装有红外线LED,摄像机镜头还装有带通滤波器。
红外线LED用于照明,红外线滤波器将其他波长的光过滤掉。
这样的话系统可以不受太阳光或室内照明的影响进行测量。
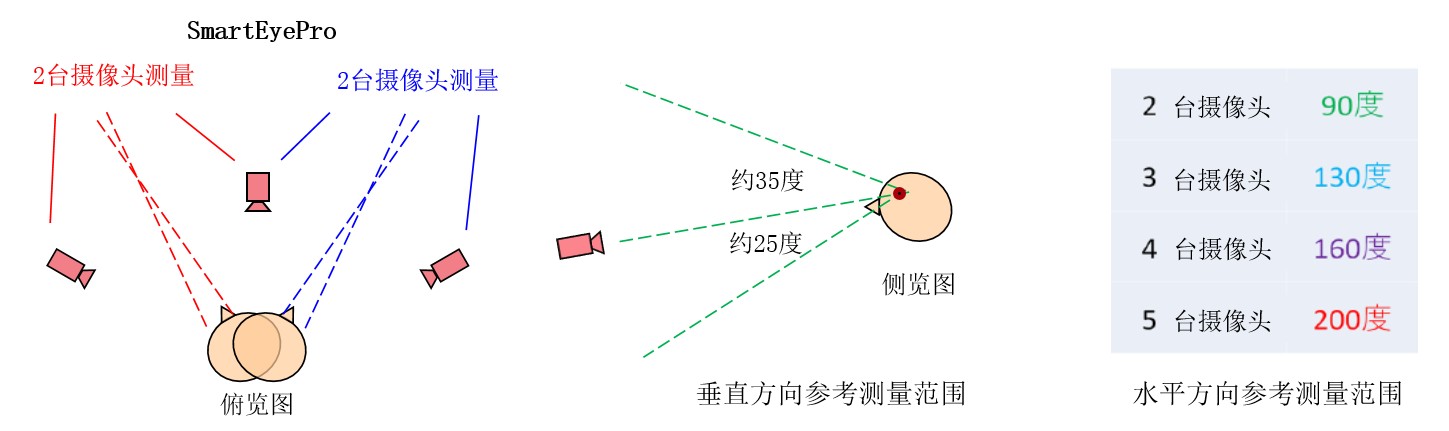
●测量范围的扩展性
一套系统可以支持1-8台摄像头。
根据摄像头的台数的增加,测量的范围也可以进行扩展。
使用2台以上摄像头进行测量时会得到比1台摄像机更高的测量精度。
●无需登录(标定)被测者信息,可直接进行测量 (Automatic mode)
系统可迅速、自动检测出被测者的面部特征。
因此更换被测人员也无需进行头部建模等登录(标定)操作,可马上进行测量。
●摄像头的摆放位置自由度高
根据测量目的的不同,可以较为自由地在相应位置放置摄像头。

●World Model构建假象空间
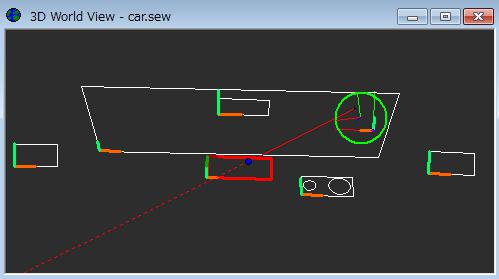
右舵车的World Model
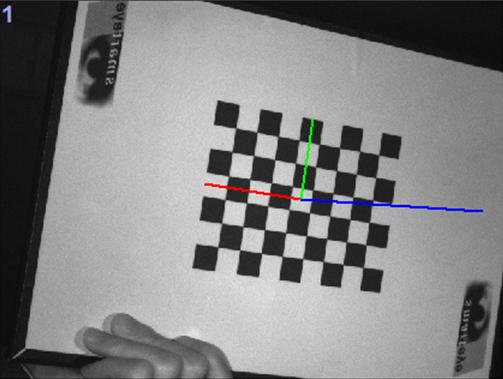
测量前进行基准坐标的设定。
输出数据是基于设定完的坐标进行计算的。
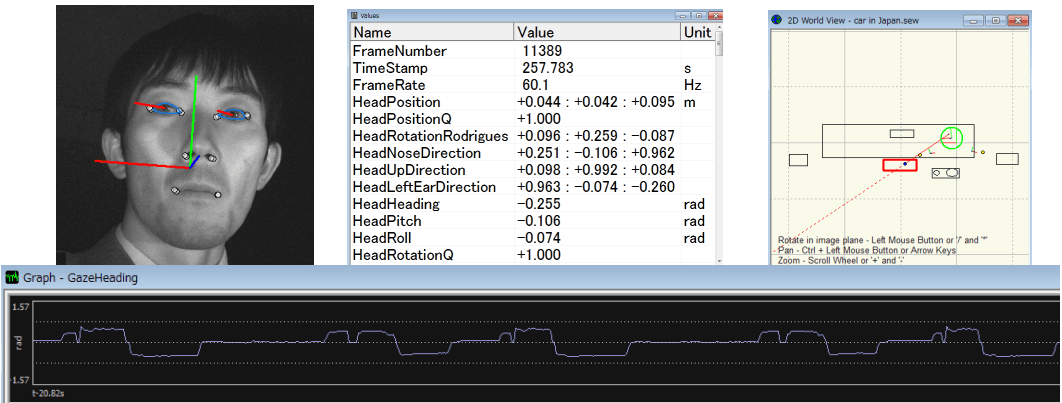
1. 被测者数据
头部位置/角度、视线原点位置※1、视线角度※1、 眼睑的开闭※1、瞳孔直径※1、目光扫视、眨眼 等
2. 系统数据
Frame number、Frame rate、Time stamp、 Time clock、Keyboard state 等
3. World Model关联数据※2
对象名、交叉点坐标
※1 单眼、及双眼平均的数据均可输出。
※2 实现与对象物体的交叉位置的数据。
●表格输出
●实时TCP/IP输出
●实时UDP/IP输出
●实时CAN输出(选件)
●分析结果实时影像显示
●实时数据显示
●实时图形表格显示
●实时3D/2D空间显示
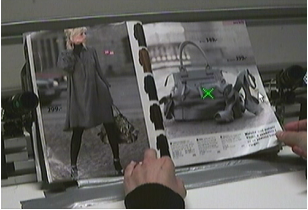
前景影像中使用×记号将被测者的注视位置标示出来。
将前景影像的信号(NTSC)输入Smart Eye Pro 系统的PC,
将记号标记在前景影像的纵横位置和使用Pro系统测量的视线的上下左右方向 对应的映像。
前景映像通常使用家用摄像机拍摄的映像或驾驶模拟器或PC的画面等。