


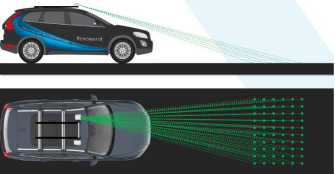
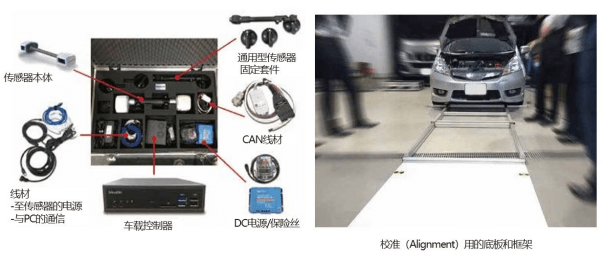
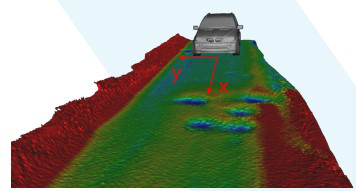
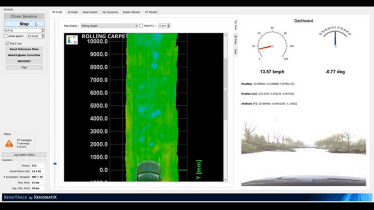
XenoTrack-RT,是基于激光雷达(LiDAR)的路面形状测量系统。将传感器安装在车,激光雷达可对路面凹凸进行测量。本激光雷达,采用真正的固态方式(True-Solid-State),没有任何运动部件,可实现2mm的超高精度测量,同一时间点可对多点进行测量,在高速行驶的状况下也能进行测量。
- True-Solid-state真正固态激光雷达LiDAR
- 无运动部件的多光束方式(三角测量距离计算技术)
- 路面形状(高度)测量,可达2mm的高精度
- 每秒18万点(3000根光束*60Hz采样)的高速高分辨率测量
- 明暗(昼夜)、恶劣天气(雨雪雾等)下均可测量
- 对车辆滚转(Roll)和俯仰(Pitch)因素进行补偿
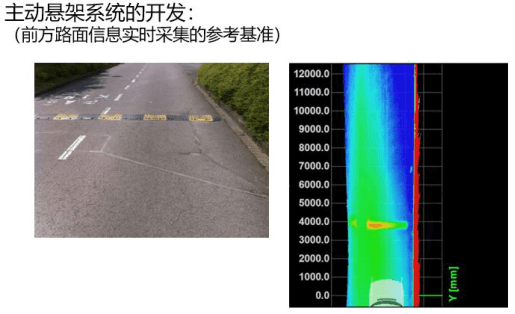
- 可对车轮前方的路面信息,以300点/秒进行实时输出
- 可对应至时速250km/h

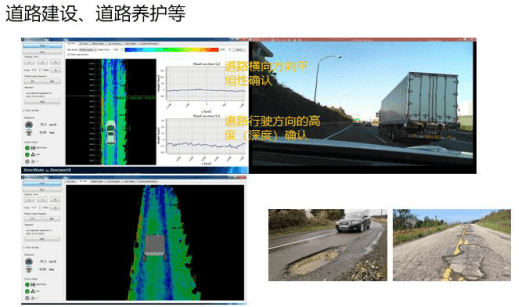
XenoTrack在道路养护中的应用举例

XenoTrack激光雷达路面测量系统,在道路养护领域有着实际的应用场景,在欧洲、日本等地区已经有了卓越的应用案例。在以下的说明中,仅以比利时某地区的一次应用案例做具体的说明。
地点:Diestsesteenweg,在比利时鲁汶和Tielt Winge之间,详见以下GPS地图数据。
类型:地区道路,高时速在50公里/时到70公里/时之间。
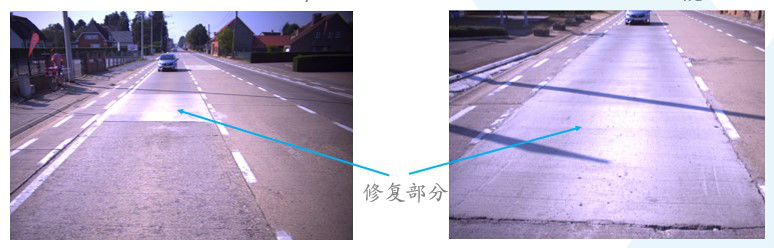
材料:部分沥青,部分混凝土

目的:
2020年夏季,该道路的部分混凝土部分已通过浇筑新混凝土进行修复。但维修后,驾驶舒适性比以前差了。道路养护的相关部门,采用XenoTrack激光雷达路面测量设备,对4.5公里长度的相应道路进行了测量并分析了IRI(国际平整度指数 / International Roughness Index)。
IRI指标:

基于XenoTrack数据的IRI分析:
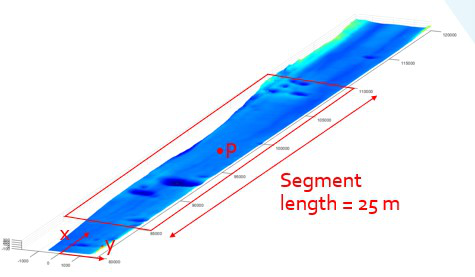
XenoTrack(x,y)分辨率=10 mm(x和y方向的小步进),因此IRI计算的分辨率为10 mm
IRI段长=25 m:对于沿数据图的左/右轮距上的每个点p,使用范围“p–12.5 m;p+12.5 m”来获得IRI结果。
IRI Profile:
每个轮距分析(冲击作用于不同的左/右车轮)

在某些位置,左/右车轮之间存在一些差异 → 由于只有一个车轮的轨迹上存在凹坑或凸起。
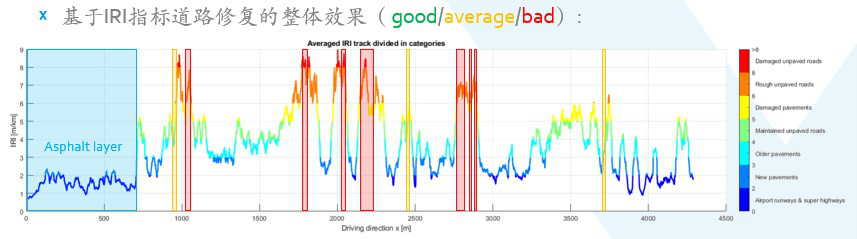
按IRI类别分析 → 整体道路状况(基于2个轮的平均值)

基于轨迹的IRI指标覆盖:
GPS数据与XenoTrack同时记录,IRI指标直接指向其道路位置

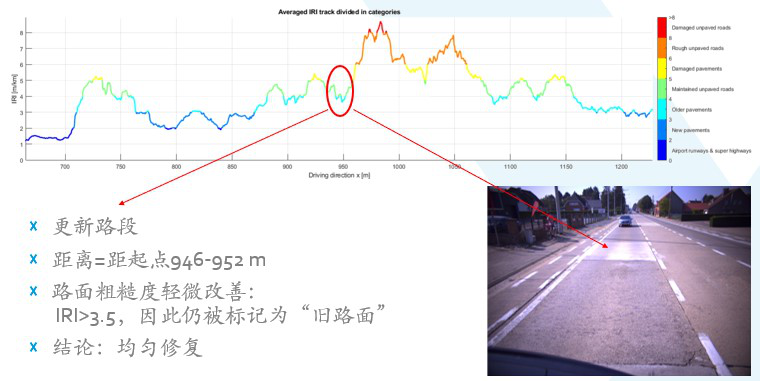
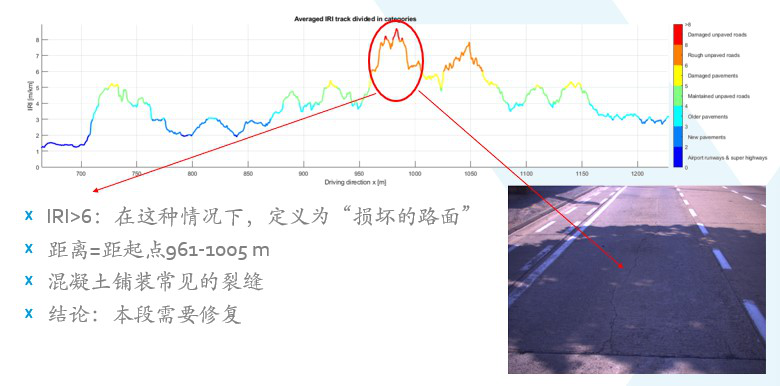
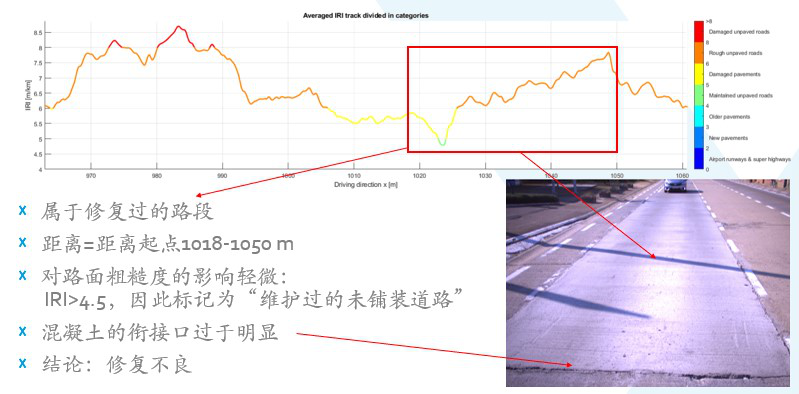
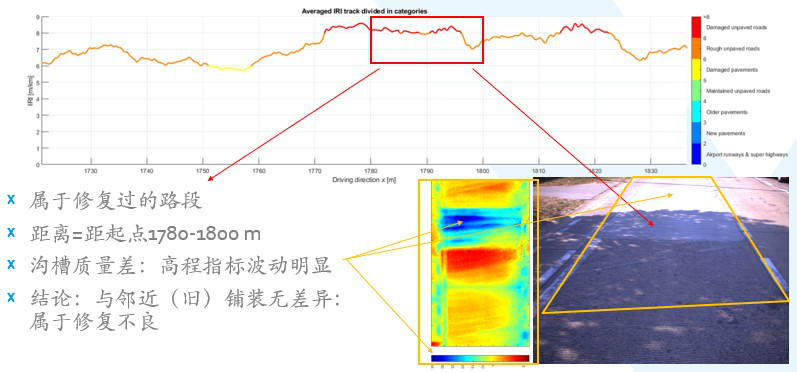
具体的IRI指标举例:
1:
2:
3:
4:
5:
6:
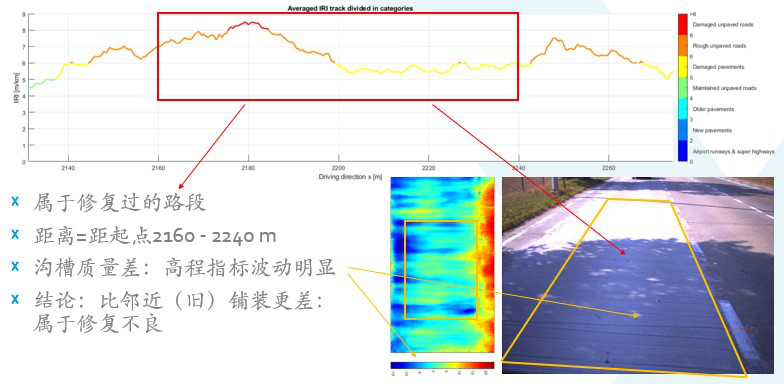
结论:
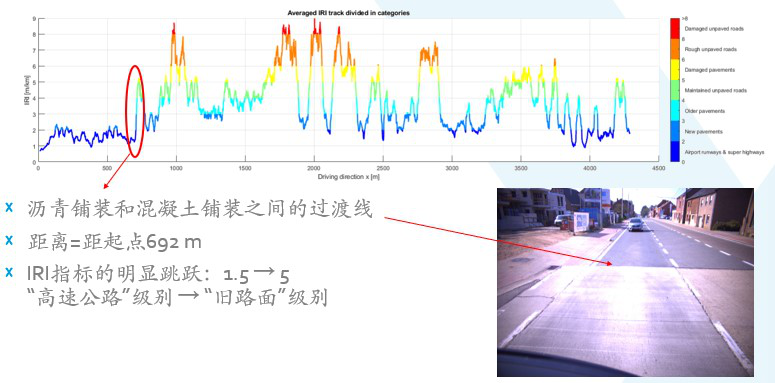
以XenoTrack激光雷达测量设备对路面进行测量,基于IRI指标,充分显示了修复后道路中的严重质量的部分。
测试获得的IRI指标,与理论分类“受损路面/旧路面”完全一致。
关于“Diestsesteenweg”路段的修复:
大部分修复的路段都是糟糕的维修!
所有更新的路段都没有显著改善道路质量!
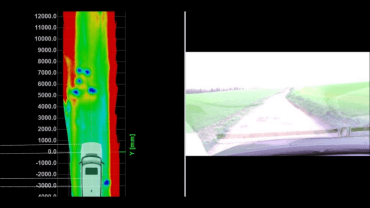
XenoTrack崎岖路面实时测量:
https://page.om.qq.com/page/OjWd7YUqpYwy8d5fwoSPG2cw0
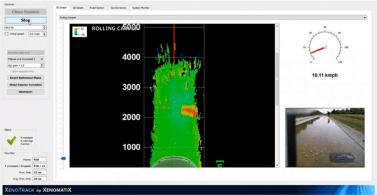
XenoTrack雨天路面实时测量:
https://page.om.qq.com/page/OY_9HA1cVDjbW502Q-_mEsjw0
XenoTrack积雪路面实时测量:
https://page.om.qq.com/page/OzWgGvUYkuFRIWPU8z9tQQWA0
真正固态激光雷达产品 — XenoLidar
XenomatiX公司一直致力于开发基于真正固态激光雷达传感技术且能够大规模量产的汽车视觉解决方案,使车辆能够全天候的在各种光照条件下对道路和周围环境进行实时数字化感知。
公司旗下的真正固态激光雷达产品:XenoLidar,可作为ADAS/自动驾驶领域必不可少的传感器部分,用于中、远距离物体的探测和跟踪。基于卓越的高密度点云,产品能提供无与伦比的中、远距离物体探测和跟踪,实时地对车辆周围环境进行监控和分析。芯片级真正固态激光雷达产品基于成熟的半导体器件,无需旋转且没有任何运动部件,符合汽车行业的车规级要求。
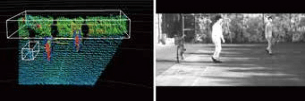
XenoLidar同时具备远距离型号(Highway)及中距离型号(Intercity),符合ADAS/自动驾驶在不同工况下的测距需求。结合XenoWare软件,能够卓越地捕捉高密度3D点云和2D成像,提供关于物体位置、运动和距离的丰富数据信息。XenoLidar能够以多种方式集成到汽车中,甚至可以安装在车辆挡风玻璃后方。